Approach
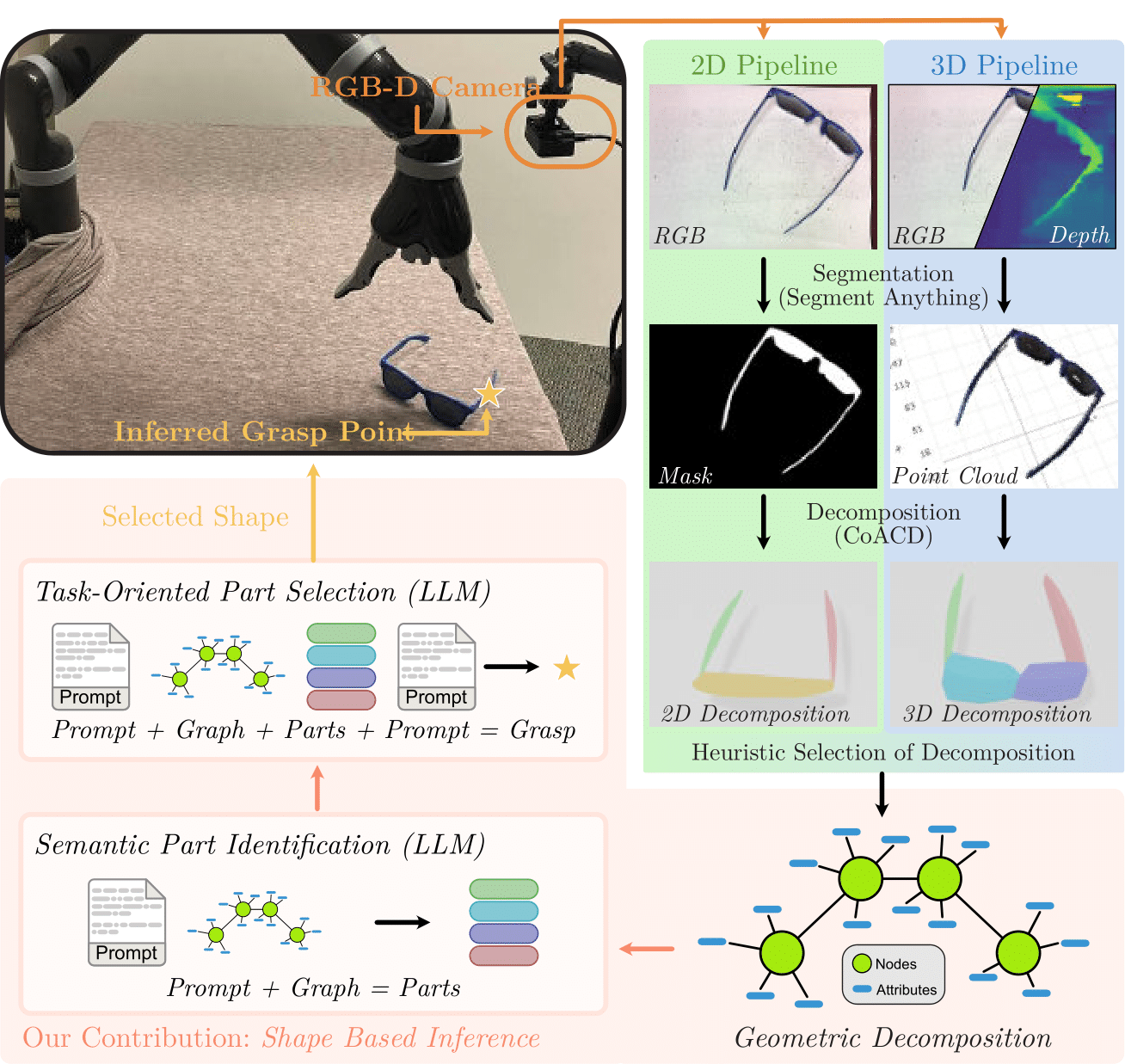
Given a target object, our RGB+D-based pipeline decomposes the object into approximate convex parts. We propose a heuristic approach to select a suitable decomposition that we then convert into a graph that captures the object's composition. Each decomposed part is approximated as a basic shape and represented as a node in the graph with geometric and color attributes. Edges within the graph are drawn between nodes whose parts are connected in the segmentation. Finally, an LLM is utilized for a two-stage reasoning process. First, the LLM reasons about the semantic significance of each node in the graph and assigns part labels. Then, using this semantic reasoning and the desired task, the LLM reasons about the task-utility of each part before selecting the most appropriate part for the robot to grasp.







